Chapitre 3 : Mise en place d’un modèle à paramètres localisés
5.1. Mise en place de réflexes d’analyse : Effet de stockage et dissipatifs
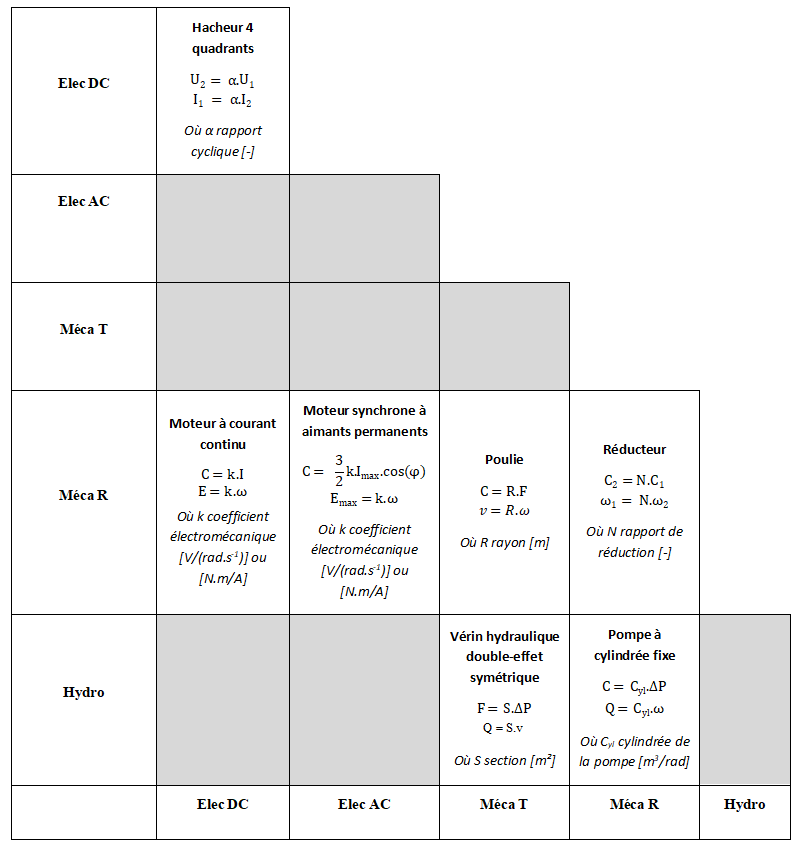
1) En fonction du phénomène à modéliser, cocher dans le tableau suivant le domaine physique et le type d’effet à prendre en compte :
1) a et f
2) b/c et h
3) b/c et g
4) a et h
5) e et h
6) a et g
7) d et f
8) e et f
9) e et h
10) c et g
11) b/c et f
12) d et h
13) d et f
2) Pour les dispositifs techniques représentés ci-dessous, indiquer l’effet dominant pour chaque partie a) à e) :
a) Ressort
b) Inertie (masse en translation)
c) Capacités électriques
d) Ressort en rotation et amortissement visqueux
e) Inertie en rotation
5.1. Mise en place de réflexes d’analyse : Effet transformateurs
1) Démontrer que les rapports de transformation $k_c$ et $k_e$ sont identiques
Moteur à courant continu idéal :
\begin{align}
P_{Rotation} &= P_{Electrique} \
C.ω &= E.I \
k_C.I.ω &= k_E.ω.I \
k_C &= k_E
\end{align}
2) Compléter le tableau ci-dessous en indiquant les composants et les équations correspondantes des deux dispositifs suivants
5.2. Lien géométrie / réseau : analyse d’une direction assistée
1) Entourez dans le tableau suivant le composant Modelica
1) Moteur à courant continu : c
2) Roue et vis sans fin : e
3) Capteur de couple sans contact : f
4) Embrayage : d
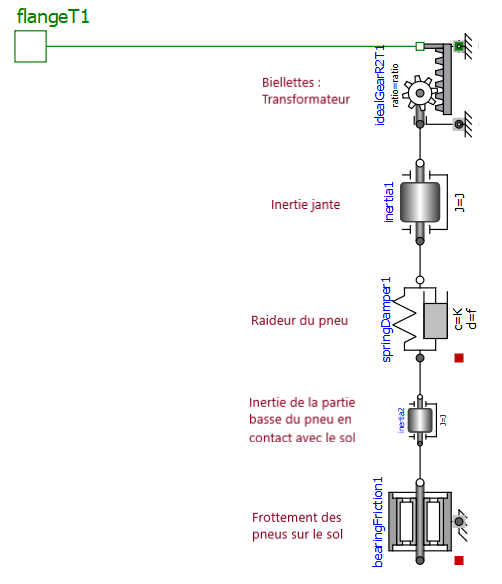
5) Crémaillère et biellettes : g et h
2) Proposer un schéma Modelica modélisant le moteur à courant continu et prenant en compte les effets transformateur, dissipatif et de stockage d’énergie tant au niveau mécanique qu’électrique.
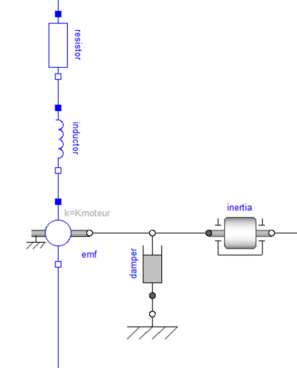
3) Indiquer sur le schéma les effets représentés par chacun des composants Modelica
5.3. Analyse systématique des effets : analyse d’un système d’injection directe par rampe commune
1) Mécanique : source de vitesse en rotation
2) Mécanique/Hydraulique : Transformateur
3) Hydraulique : Capacité
4) Hydraulique : Source de débit
5) Hydraulique : Résistance hydraulique variable
6) Hydraulique : Source de pression